Регулирование частоты вращения асинхронных двигателей
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой – либо из трех величин: скольжения s, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р.
Регулирование частоты вращения изменением скольжения sвозможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора.
Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно, и частота вращения остаются практически неизменными.
Регулирование частоты вращения изменением подводимого напряжения.Возможность этого способа регулирования подтверждается графиками М = f(s), построенными для разных значений U1 (см. рис. 13.5). При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения. Последнее объясняется тем, что с превышением номинального напряжения возникает опасность чрезмерного перегрева двигателя, вызванного резким увеличением электрических и магнитных потерь. В то же время с уменьшением напряжения U1двигатель утрачивает перегрузочную способность, которая, как известно, пропорциональна квадрату напряжения сети (см. § 13.2).
Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов.
Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения.При нарушении симметрии подводимой к двигателю трехфазной системы напряжения вращающееся поле статора становится эллиптическим (см. § 9.4). При этом поле приобретает обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр. В итоге результирующий электромагнитный момент двигателя уменьшается (М = Мпр – Мобр).
Механические характеристики двигателя при этом способе регулирования располагаются в зоне между характеристикой при симметричном напряжении (рис. 15.10, а, кривая 1) и характеристикой при однофазном питании двигателя (кривая 2) — пределом несимметрии трехфазного напряжения.
Для регулировки несимметрии подводимого напряжения можно в цепь одной из фаз включить однофазный регулировочный автотрансформатор (AT) (рис. 15.10, б). При уменьшении напряжения па выходе AT несимметрия увеличивается и частота вращения ротора уменьшается. Недостатками этого способа регулирования являются узкая зона
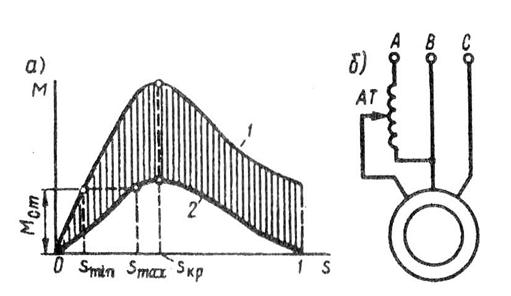
Рис. 15.10. Механические характеристики (а) и схема включения (б) асинхронного двигателя при регулировании частоты вращения изменением симметрии трехфазной системы
регулирования и уменьшение КПД двигателя по мере увеличения несимметрии напряжения. Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора.Этот способ регулирования частоты вращения возможен лишь в двигателях с фазным ротором. Механические характеристики асинхронного двигателя, построенные для различных значений активного сопротивления цепи ротора (см. рис. 13.6), показывают, что с увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному нагрузочному моменту. Частота вращения двигателя при этом уменьшается. Зависимость скольжения (частоты вращения) от активного сопротивления цепи ротора выражается формулой, полученной преобразованием (13.13):
Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) (см. рис. 15.2), но рассчитанного на длительный режим работы. Электрические потери в роторе пропорциональны скольжению (Рэ2 = sPэм), поэтому уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Так, если при неизменном нагрузочном моменте на валу двигателя увеличить скольжение от 0,02 до 0,5, что соответствует уменьшению частоты вращения примерно вдвое, то потери в цепи ротора составят почти половину электромагнитной мощности двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования. К тому же необходимо иметь в виду, что рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя (см. § 31.1).
Рассматриваемый способ регулирования имеет еще и тот недостаток, что участок механической характеристики, соответствующий устойчивой работе двигателя, при введении в цепь ротора добавочного сопротивления становится более пологим и колебания нагрузочного момента на валу двигателя сопровождаются значительными изменениями частоты вращения ротора. Это иллюстрирует рис. 15.11, на котором видно, что если нагрузочный момент двигателя изменится на ΔМст = М / ст – М // ст, то изменение частоты
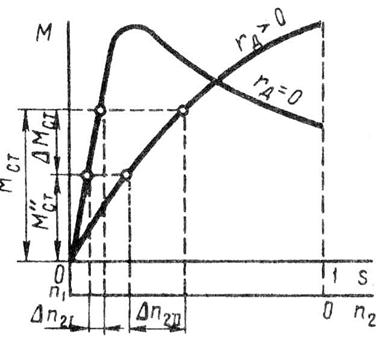
Рис. 15.11. Влияние сопротивления цепи ротора на
колебания частоты вращения при изменении нагрузки
вращения при выведенном регулировочном реостате ( rд‘ = 0 ) составит Δn2I, а при введенном реостате – Δn2II. В последнем случае изменение частоты вращения значительно больше.
Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным (при плавном изменении сопротивления РР) или ступенчатым (при ступенчатом изменении сопротивления РР).
Способ обеспечивает регулирование частоты вращения в широком диапазоне, но только вниз от синхронной частоты вращения. Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства (см. § 15.1).
Регулирование частоты вращения изменением частоты тока в статоре.Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f1 60/ р .
Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться электромашинные, ионные или полупроводниковые преобразователи частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1. Но с изменением частоты f1 = ω1p/ (2π) будет изменяться и максимальный момент [см. (13.18)]. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и напряжение питания U1. Характер одновременного изменения f1 и U1 зависит от закона изменения момента нагрузки и определяется уравнением
U / 1 /U1 = (f1 / /f1)  (15.4)
(15.4)
где U1 и М — напряжение и момент при частоте f1 ; U’1 и М’ -напряжение и момент при частоте f ‘1.
Если частота вращения двигателя регулируется при условии постоянства момента нагрузки ( М = М’ = const), то подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока:
При этом мощность двигателя увеличивается пропорционально нарастанию частоты вращения. Если же регулирование производится при условии постоянства мощности двигателя ( Рэм = Мω1 = const), то подводимое напряжение следует изменять в соответствии с законом
U’1 = U1  . (15.6)
. (15.6)
Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне (до 12:1). Однако источники питания с регулируемой частотой тока удорожают установку. Поэтому частотное регулирование до последнего времени применялось в основном для одновременного регулирования группы двигателей, работающих в одинаковых условиях (например, рольганговых двигателей). Но благодаря развитию силовой полупроводниковой техники в последние годы созданы устройства частотного регулирования, технико-экономические показатели которых оправдывают их индивидуальное применение для регулирования частоты вращения одиночных двигателей.
Дата добавления: 2014-12-27 ; Просмотров: 5740 ; Нарушение авторских прав? ;
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Регулирование частоты вращения электроприводов является одной из важнейших задач современной электротехники. Разработка и применение рациональных способов регулирования позволяют повысить производительность механизмов, улучшить качество выпускаемой продукции, упростить механическую часть привода, уменьшить расход электроэнергии и т. д.
С регулированием частоты вращения не следует смешивать естественное изменение частоты вращения электродвигателя в соответствии с его механической характеристикой, когда изменяется нагрузка на валу привода. Регулирование — это принудительное изменение частоты вращения электропривода в зависимости от требований приводного механизма.
Любой способ регулирования характеризуют следующие основные показатели:
диапазон регулирования — отношение максимальной частоты вращения к минимальной, которое можно получить в приводе т.е.  ;
;
плавность регулирования – число устойчивых скоростей, получаемых в данном диапазоне регулирования;
экономичность — учет затрат, связанных с созданием самого способа регулирования, и дополнительных потерь энергии, возникающих в приводе;
стабильность работы привода — изменение частоты вращения при изменении момента на валу двигателя. Стабильность работы целиком определяется жесткостью механических характеристик;
направление регулирования показывает, что частота вращения изменяется только вниз или только вверх от основной частоты вращения привода или же возможно регулирование и вверх и вниз.
Частоту вращения ротора асинхронного двигателя определяют по формуле:

где f— частота переменного тока; р — число пар полюсов обмотки статора; s — скольжение.
Из представленной выше формулы можно заключить, что частоту вращения асинхронного двигателя можно регулировать изменением одной из трёх величин:
– числа пар полюсов магнитного потока статора p;
– частоты тока в статоре f.
Рассмотрим возможности регулирования частоты вращения ротора путем изменения скольжения. Скольжение является функцией многих параметров двигателя:
где R1X1— активное и индуктивное сопротивление цепи статора,; R2, Х2— то же, ротора;
U — напряжение питания двигателя.
Из формулы видно, что для изменения скольжения s можно вводить дополнительные резисторы или индуктивности в цепи обмоток статора или ротора либо уменьшать напряжение питания двигателя.
Известно, что максимальный момент асинхронного двигателя пропорционален квадрату напряжения сети и механические характеристики при различных напряжениях имеют вид, показанный на рис.5.8, a. Анализ этих характеристик совместно с характеристикой момента сопротивления Мс.г грузоподъемного устройства показывает, что регулирование частоты вращения возможно в очень узком диапазоне. При напряжении 0,6 Uндвигатель не запустится, так как Мп 2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.5.13 (б).
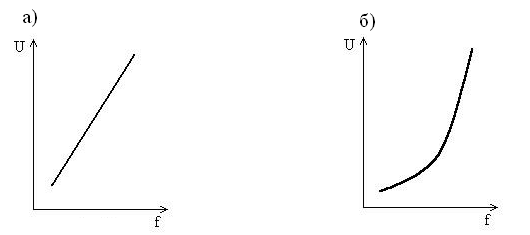
Рис.5.13 Характер зависимости напряжения питания от частоты для случая:
а) с постоянным моментом нагрузки
б) с вентиляторноым моментом нагрузки
При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
Преобразователь частоты – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса:
1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока.
2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока).
Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
У преобразователей с непосредственной связью (рис. 5.14) силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристотров и подключает статорные обмотки двигателя к питающей сети.
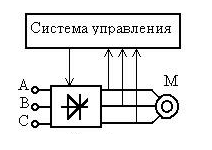
Рис. 5.14 Преобразователь частоты с непосредственной связью
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5.15 показан пример формирования выходного напряжения для одной из фаз нагрузки.
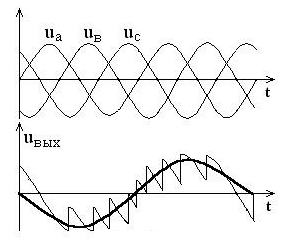
Рис.5.15 Формирования выходного напряжения для одной из фаз нагрузки
На входе преобразователя действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
– практически самый высокий КПД относительно других преобразователей (98,5% и выше),
– способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах,
– относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
Наиболее широкое применение в современных частотно регулируемых приводах находят преобразователи с явно выраженным звеном постоянного тока (рис. 5.16.).
В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к.п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
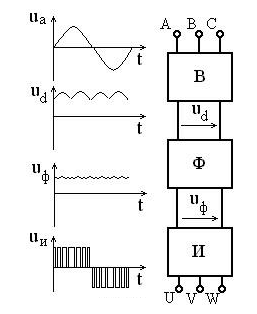
Рис 5.16 Преобразователь частоты с звеном постоянного тока
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 – 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 – 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая неэнергоемкая система управления, самая высокая рабочая частота
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в преобразователях частоты снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных преобразователей, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 – 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких единичных модулей.
Типовая схема низковольтного преобразователя частоты на IGBT представлена на рис. 5.17 В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента преобразователя.
Переменное напряжение питающей сети (uвх.) с постоянной амплитудой и частотой (Uвх = const, fвх = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (uвыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение ud поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
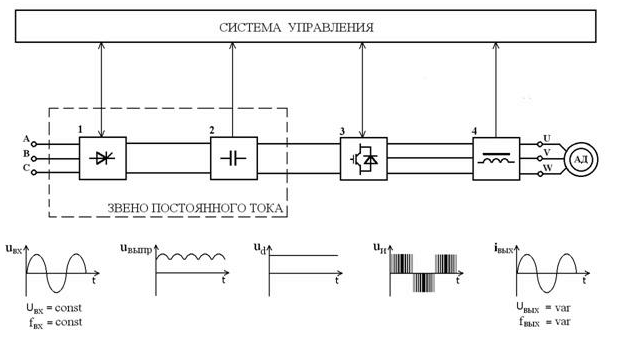
Рис. 5.17 Типовая схема преобразователя частоты на IGBT транзисторах
В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение uи изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока. Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя. Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 … 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uи может достигаться регулированием величины постоянного напряжения ud, а изменение частоты – режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (Uвых = var, fвых = var).
Во всех режимах работы асинхронный машин всегда присутствует вращающееся магнитное поле статора. Оно создаётся тремя обмотками, сдвинутыми в пространстве относительно друг друга на 120 градусов, скорость этого вращения равна:

Формула скорости вращения магнитного поля статора
n1 – Скорость вращения магнитного поля статора;
f – Частота питающей сети (50Гц);
p – Количество пар полюсов (max 12 min 2);
Из формулы понятно, что скорость вращения магнитного поля статора асинхронной машины зависит от: частоты питающей сети, на территории стран СНГ она постоянна и равняется 50Гц, от количества пар полюсов в статоре асинхронной машины. Скорость вращения ротора синхронной машины напрямую зависит от скорости вращения магнитного поля статора.
Так же известно, что в их конструкции присутствует ротор, вращающаяся часть, которая может вращаться с различными скоростями. В целом можно сказать, что в асинхронных машинах скорость вращения изменяется только у ротора. Многочисленные наблюдения показали, что в зависимости от частоты вращения ротора асинхронной машины, с ней происходят различные явления. Для упрощения понимания этого вопроса, был введен параметр скольжение S – разность скоростей вращения магнитного поля статора, от скорости вращения ротора:

Эти скорости обозначают буквенно: n – скорость вращения ротора; n1 – скорость вращения магнитного поля.
Режим работы асинхронной машины зависит именно от этого значения разности скоростей вращения магнитного поля статора и скорости вращения ротора.
Различают следующие режимы работы асинхронных машин:
- Режим двигателя;
- Режим генератора;
- Режим электромагнитного тормоза;
- Режим динамического торможения;
Режим двигателя
Асинхронные двигатели стали очень популярна и наиболее часто применяемая в электроприводах. Режим электродвигателя применяется для приведения во вращение различные устройства, механизмы, насосы, лебедки, редуктора и т.д. путем преобразования электрической энергии в механическую. Как уже многим известно, что её принцип действия объясняется взаимодействием двух магнитных полей статора и ротора. Магнитное поле статора создается системой трехфазных обмоток и магнитопровода, расположенных непосредственно на статоре (корпусе асинхронной машины). Это поля является вращающимся, так как в трех фазной цепи, ток протекает из фазы А в фазу В, из фазы В в фазу С, а из фазы С обратно в фазу А. Обмотки каждой фазы располагают на статоре так, что бы равномерно заполнить всю окружность, т.е. окружность занимает 360 градусов, имея три обмотки, делим 360/3 получаем 120 градусов на каждую обмотку.

Это вращающееся магнитное поле пронизывая ротор, индуцирует в нем ЭДС, так как ротор короткозамкнутый, то по нему протекает ток. Протекание тока вызывает образование у ротора собственного магнитного поля. Поле статора, которое вращается с скоростью n1 взаимодействует с полем ротора, которое является неподвижным, и старается остановить, затормозить поле статора. Так как ротор закреплен на подшипниках, он способен свободно вращаться вокруг своей оси. Получается, что магнитное поля статора притягивает поле ротора, увлекает его за собой с определенной силой, в результате чего и сам ротор начинает вращаться.
Особенностью этого режима является то, что скорость вращения магнитного поля статора и скорость вращения ротора не должны быть равными, тем более, скорость ротора всегда меньше. Если же каким-либо образом их скорости будут равными, то исходя из явления электромагнитной индукции, обязательна разность магнитного потока, пересекающего тот или иной контур, что и обеспечивается отставанием ротора от магнитного поля статора. Если же все-таки их скорости сравняются, по короткозамкнутой обмотке ротора перестанет протекать электрический ток, исчернит его магнитное поле и ротор не будит увлекаться полем статора. Скольжение в режиме электродвигателя должно быть положительным числом и не равным нулю.
Стоит добавить, что режим двигателя у асинхронных машин является самым часто используемым.
Режим генератора
Режим генератора у асинхронных машин является полной противоположностью режиму двигателя. Самым главным отличием является то, что при режиме двигателя, асинхронная машина потребляет из сети электрическую энергию. А в режиме генератора наоборот отдает в сеть выработанную электрическую энергию.
Режим генератора возможен только тогда, когда скорость вращения ротора n будет выше скорости вращающегося магнитного поля статора. В этом случаи скольжение S будит отрицательным. Для этого необходимо ускорить ротор синхронной машины, то есть посадить на вал ротора, какой-либо механизм (турбина, редуктор, другой двигатель).

Допустим ротор мы разогнали до 3500 оборотов в минуту, а скорость магнитного поля статора 3000 оборотов в минуту, определим скольжение:
Режим генератора у асинхронных машин не является часто используемым, и может применяться в узких специализированных областях, в маломощных электростанциях.
Стоит отметить, что при таком режиме работы, отдаваемая в сеть электроэнергия совпадает по частоте с частотой самой сети. Так как она зависит только от частоты вращения магнитного поля статора, которая как мы знаем не изменяется.
В использовании таких генераторов есть огромный плюс, в его устройстве отсутствуют скользящие контакты, вращающиеся обмотки, это обеспечивает надежную и долговременную эксплуатацию. Так же эти генераторы мало восприимчивы к коротким замыканиям в сети. Еще не маловажным условием работы является, наличие остаточной намагниченности ротора, которое усиливается конденсаторными установками, включенными в цепи статорных обмоток.
Режим электромагнитного торможения
Режим электромагнитного торможения является еще более специфичными специализированным. Вся суть этого режима в том, что если вращение ротора асинхронной машины не совпадает с направлением вращения магнитного поля статора, то ротор будит затормаживаться под действием этого магнитного поля статора. Такой режим возможен только при реверсивном подключении асинхронной машины, так как путем переключения двух фаз достигается изменение направления вращения магнитного поля статора, и используется в различных грузоподъемных и транспортировочных устройствах. Этот режим часто называют режимом торможения противотоком или противовключением. При таком режиме, если нам необходимо остановить двигатель, при полной остановке, статор необходимо отключить от сети, так как вал начнет вращаться в обратном направлении.
Режим динамического торможения
В таком режиме, асинхронная машина отключается от трех фазной сети, и на обмотки статора подается постоянный ток. Таким образом на статоре образуется постоянное магнитное поле (постоянный магнит), которое тормозит ротор двигателя.
Все выше представленные режимы работы асинхронных машин, кроме режима двигателя, являются специализированными, и используются только в определенных установках, устройствах, станках и т.д.